Abstract
Have you ever wanted to explore cold or murky water? What about places where it could be dangerous or difficult for humans to swim? Remotely operated vehicles (ROVs) allow humans to take pictures, videos, and scientific samples of underwater life and habitats while safely operating the vehicle from a boat or from shore. In this project you will design and build your own small ROV that you can test in a bathtub, pool, or nearby body of water.
Summary
Previous experience with Arduino is recommended. See our How to Use an Arduino page.
A kit is available from our partner Home Science Tools®. See the Materials section for details.
Make sure you have permission to operate your ROV in any body of water where you plan to test it.
/-/https/i.ytimg.com/vi/wRco4tGXrzw/maxresdefault.jpg)
Objective
Design, build, and test an underwater ROV.
Introduction
Remotely operated vehicles (Figures 1 and 2) serve a variety of purposes. Scientists can use them to explore the oceans, and the military can use them for dangerous tasks like disarming mines. ROVs can even perform maintenance on underwater equipment.
/-/https/www.sciencebuddies.org/cdn/Files/19626/8/Hercules-ROV.jpg)
Figure 1. Hercules, a scientific ROV, is launched into the ocean from a boat using a crane.
/-/https/www.sciencebuddies.org/cdn/Files/19627/8/deep-discover-ROV.jpg)
Figure 2. The Deep Discover ROV operates underwater. Image credit NOAA Ocean Exploration and Research, CC BY-SA 2.0.
As you can see in Figures 1 and 2, ROVs can have a variety of attachments for different purposes. These can include cameras, lights, robotic arms for grasping and manipulating objects, and tools for taking water or sediment samples. They can also have a variety of electronic sensors, such a sonar sensor, which is useful for detecting obstacles if visibility is poor.
Since radio waves do not travel well underwater, ROVs are typically attached to a tether for control. The tether is a long cable that houses the wires to send and receive data (and sometimes power) to the ROV. ROVs use underwater thrusters, motors with propellers attached, to steer. If they are neutrally buoyant, they can hover at a fixed depth in the water, using thrusters to move up and down when needed.
In this project you will build your own small ROV using a plastic food storage container and an Arduino. The project instructions will provide you with the basic design, parts list, circuit diagram, and code to build a simple ROV with two motors. You will use an integrated circuit called an H-bridge to control the motors. This video provides an overview of how to use an H-bridge with an Arduino:
/-/https/i.ytimg.com/vi/YU17L650k3s/maxresdefault.jpg)
Since the ROV only has two motors, it can only steer left and right, not up or down. You can adjust its buoyancy to make it skim along the surface of the water, skim along the bottom, or operate at a fixed depth (by attaching a float to the tether). You will need to decide whether you want to use more motors to make your ROV more maneuverable. You will also need to decide what instruments or payload you want to attach to your ROV. For example, you could attach a camera to record footage of aquatic life (Figure 3), but there are many other options. See the Materials list for some suggestions. Get ready to start exploring the underwater world with your own ROV!
/-/https/www.sciencebuddies.org/cdn/Files/19628/8/arduino-ROV.jpg)
Figure 3. The type of ROV you will build in this project.
Terms and Concepts
- Remotely operated vehicle (ROV)
- Sensor
- Tether
- Thruster
- Neutrally buoyant
- H-bridge
Questions
- What are some real-world uses for ROVs?
- How do ROVs steer underwater?
- What kind of attachments can you put on an ROV?
- What do you want to use an ROV for?
Bibliography
- NOAA (n.d.). What is an ROV? Retrieved April 20, 2023.
- Science Buddies Staff (n.d.). How to Use an Arduino. Science Buddies. Retrieved April 20, 2023.
- Science Buddies Staff (n.d.). Engineering Design Process. Science Buddies. Retrieved April 20, 2023.
Materials and Equipment 
Recommended Project Supplies
/-/https/www.sciencebuddies.org/cdn/Files/19915/12/SB_ARDNSTR_web__01473.jpg)
The following is a list of parts you will need to replicate the ROV shown in the Procedure section of this project. Since this is an engineering design project, you may choose to change or add parts to your materials list. For example, you might want to use a larger battery, more motors, or additional sensors, or you may want to use different inputs to steer your ROV. While breadboards are good for prototyping, you may wish to solder your circuit instead to make it more durable and permanent. We recommend that you read through the complete procedure and come up with a design for your ROV before you order parts.
- Circuit parts
-
Electronics Kit for Arduino, available from our partner Home Science Tools®.
- Note: This project will work with the Arduino UNO R3, UNO R4 Minima, UNO R4 WiFi, and compatible third-party boards.
- Solderless breadboards (2, one is included in the Science Buddies kit). Size will depend on the size of your container and the complexity of your circuit. We used "half size" (400 contact point) breadboards.
- Jumper wires. Long, flexible jumper wires are useful for connecting to the Arduino, but shorter solid-core jumper wires will help keep your breadboard neat. We recommend purchasing both types.
- 2-Axis analog joystick (2). Our design only uses one axis from each joystick, so you could also use two one-axis joysticks, or a single two-axis joystick, depending on how you want to control your ROV.
- L293D H-bridge integrated circuit. Our instructions show you how to connect the L293D on a breadboard to control the thrusters, but a variety of motor driver boards for Arduino are also available. Make sure the current rating of your motor driver is sufficient for your motors. The L293D has a maximum current of 600 mA per channel, which is sufficient for the motors listed in the next point.
- Underwater thrusters (2). Note that while it is possible to buy a DC motor, waterproof it, and attach a propeller yourself, if you buy underwater thrusters these steps are already done for you. If you want to use the motor control circuit shown in the procedure, you need to buy a "brushed" (not "brushless") thruster. We tested these thrusters and these thrusters. Both work, but note that the latter only comes with clockwise (CW) propellers. Ideally, you want one clockwise and one counterclockwise (CCW) propeller. If both your propellers spin in the same direction, then due to conservation of angular momentum, your ROV will roll in the opposite direction. However, from our tests, this is not a major problem if your ROV is skimming the surface or the bottom of the water. It may be more of a problem for a neutrally buoyant ROV.
- 7.4 V Lithium battery and compatible charger. Note that the Arduino requires 7–12 V as an input, so you cannot power the Arduino from a single 3.7 V lithium battery. While you can power the Arduino from a 9 V battery, a 9 V battery will not be sufficient to power the motors.
- JST plug connector. (Make sure it is compatible with your battery.)
- Waterproof rocker switch. This switch lets you turn your ROV on and off without removing the lid. A variety of these switches are available. Make sure you have the proper tools to drill or cut the right size hole for the switch you purchase.
- 4-Conductor ribbon cable.
- Spring or screw quick connectors. These are useful for connecting thicker wires that do not fit into the breadboard, like the motor and battery wires.
- If you want to record video with your ROV, you will need a waterproof camera. If you want a real-time video feed, you can look into fishing cameras or fish detectors, which have a waterproof camera tethered to a display with a long, flexible cable.
- Any other sensors or equipment you would like to mount to your ROV. Make sure you consider whether the sensors need to be mounted inside or outside the ROV's case, if they will require waterproofing, etc. For example, a light sensor like a photoresistor can be mounted inside a clear plastic case, but a sonar sensor cannot because the sound would just bounce off the inside walls of the case.
-
Electronics Kit for Arduino, available from our partner Home Science Tools®.
- Windows or Mac computer. See this page if you have a Chromebook. Your computer will need:
- Access to the Arduino IDE, either installed local version or web-based editor. Watch this video for a comparison of the two options.
- USB port. The Science Buddies kit comes with a USB-A to C cable. The "C" end plugs into the Arduino, and the "A" end plugs into your computer. You will need an adapter or different cable if your computer only has USB-C ports. Watch this video to learn about the different types of cables and adapters.
- Other parts, hardware, and tools
- Clear, airtight plastic food storage container
- Waterproof silicone sealant
- Disposable gloves
- Eye protection
- Wire strippers
- Drill and drill bits
- Sandpaper, file, or de-burring tool
- Stainless steel hardware, such as nuts, bolts, and washers, for mounting thrusters and accessories. (Sizes will vary depending on your attachments.)
- Plastic cable clips
- Zip ties
- Double-sized foam tape
- Fishing bobber
- Materials to adjust the buoyancy of your ROV, such as foam, pool noodles, etc. (more buoyant), or heavy objects like metal bars or rocks (less buoyant)
- Bathtub or kiddie pool for initial testing of your ROV
- Larger body of water, like a pool or a pond, for further testing. We recommend avoiding bodies of water with strong currents.
Disclaimer: Science Buddies participates in affiliate programs with Home Science Tools®, Amazon.com, Carolina Biological, and Jameco Electronics. Proceeds from the affiliate programs help support Science Buddies, a 501(c)(3) public charity, and keep our resources free for everyone. Our top priority is student learning. If you have any comments (positive or negative) related to purchases you've made for science projects from recommendations on our site, please let us know. Write to us at [email protected].
Experimental Procedure
- Before you purchase any parts or start building anything, you should come up with a preliminary design for your ROV. It is OK if you end up changing your design later. While it can be tempting to start building something right away, especially when you are excited about a project, you should carefully go through the steps of the engineering design process, which include defining the problem, doing background research, specifying requirements, and brainstorming solutions before you get to the prototyping stage. This is not an exhaustive list, but here are a few questions to help get you started when designing your ROV.
- Where do you plan to test and use your ROV? Can you do initial tests in a bathtub or other large tub of water? Do you eventually plan to use it in something larger, like a pool or a pond? We recommend avoiding bodies of water with strong currents.
- Will you always be able to see your ROV? Will you need a real-time video feed in order to operate it?
- What do you want the range of your ROV to be? How long should the tether be?
- What information do you want to gather with your ROV? Do you want to record still images or videos? Record environmental data, like temperature or light levels? Gather water or sediment samples?
- Do you want your ROV to interact with the environment somehow — for example, by grasping or scooping things up?
- What equipment is required to do the things you listed in points d and e?
- How big does your ROV need to be to fit all the required equipment?
- How will your ROV maneuver? Do you want to make it buoyant enough that it always floats on the surface? Heavy enough that it sinks and skims along the bottom? Neutrally buoyant?
- Do you plan to add more motors so your ROV can steer up and down?
- How do you want to control your ROV? The example code below uses "tank" steering (two separate joysticks control the left and right motors independently). Alternatively, you could control the forward/backward and left/right motion of your ROV with a single two-axis joystick. If you want to add more motors, you will need additional control inputs.
- Are there any potential obstacles or hazards in the environment that you need to watch out for? For example, it may be OK to build an ROV that skims along the bottom of a pool, but this might not work in a pond or lake where the tether could easily get snagged on rocks or sticks.
- Charge your batteries so they are ready for use later.
- Before you worry about physical construction and waterproofing your ROV, you should build and test the circuit. This will help you make sure that your motor control and any sensors are working properly. It will be much easier to change your circuit now than after everything is mounted to the ROV. Figure 4 shows a picture of the assembled example circuit. It has several main components: the Arduino, one breadboard for the H-bridge and motor connections, one breadboard for the joysticks, the two underwater thrusters, and the lithium battery (which powers the whole system). The next step includes detailed instructions for building the circuit.
Figure 4. Circuit assembled for testing before mounting in the ROV case.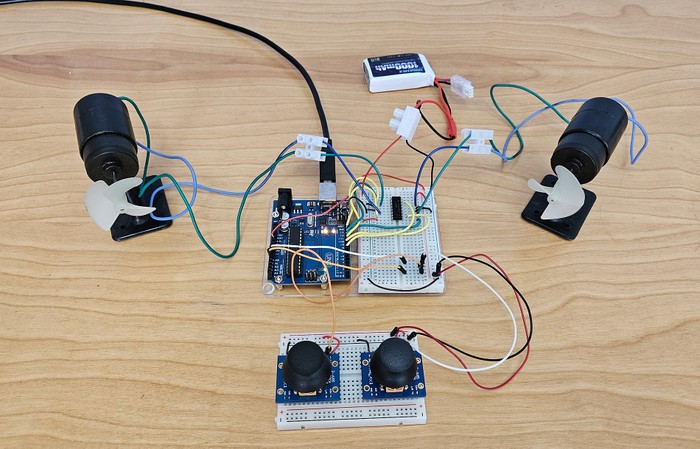
- Build the circuit as shown in Figures 5 and 6. You can also watch a video overview of the circuit below. Figure 5 shows a breadboard diagram and Figure 6 shows the schematic. Use screw/spring terminals as needed to connect any large wires to smaller jumper wires that will fit in the breadboard. You can also access the Tinkercad simulation directly, where you can zoom in on the circuit. Note that Tinkercad does not have a joystick part, so the diagram uses potentiometers as a substitutes. You can also follow this list of connections:
- H-bridge (pins numbered counter-clockwise from the top left). Important: the semi-circular notch in the H-bridge chip should go toward the top of the breadboard (row 1).
- Pin 1 to Arduino pin 11
- Pin 2 to Arduino pin 12
- Pin 3 to right motor negative wire
- Pin 4 to ground
- Pin 5 to ground
- Pin 6 to right motor positive wire
- Pin 7 to Arduino pin 9
- Pin 8 to 7.4 V from the battery
- Pin 9 to Arduino pin 10
- Pin 10 to Arduino pin 8
- Pin 11 to left motor positive wire
- Pin 12 to ground
- Pin 13 to ground
- Pin 14 to left motor negative wire
- Pin 15 to Arduino pin 7
- Pin 16 to 5 V from Arduino
- Joysticks. Important: Figure 5 uses potentiometers to represent the joysticks. These potentiometers have equivalent electrical connections (power, ground, and analog signal), but the physical spacing of the joystick pins is different than what is shown in Figure 5.
- Left joystick.
- L/R+ to 5 V from Arduino
- L/R to Arduino analog pin A0
- GND to ground
- Right joystick
- L/R+ to 5 V from Arduino
- L/R to Arduino analog pin A1
- GND to ground
- Battery
- Double-check all of your wiring before connecting the battery.
- Connect the positive wire to the Arduino's Vin pin.
- Connect the negative wire to the Arduino's GND pin.
- Recommended: connect the switch in series with the battery's positive wire so you can easily turn your ROV on and off without unplugging wires.
- Make sure all breadboard ground buses are connected to Arduino GND so the entire circuit has a common ground.
- Do not connect the left and right side power buses on the main breadboard to each other. This will create a short circuit between the 5 V supply from the Arduino and the 7.4 V supply from the lithium battery.
Figure 5. Breadboard diagram of the motor control circuit. Click here for a larger version of the diagram and click here to access the Tinkercad simulation. Note that Tinkercad does not have a joystick part, so two potentiometers are used to represent the joysticks in this image. Each potentiometer has a connection to power, ground, and one of the Arduino analog pins.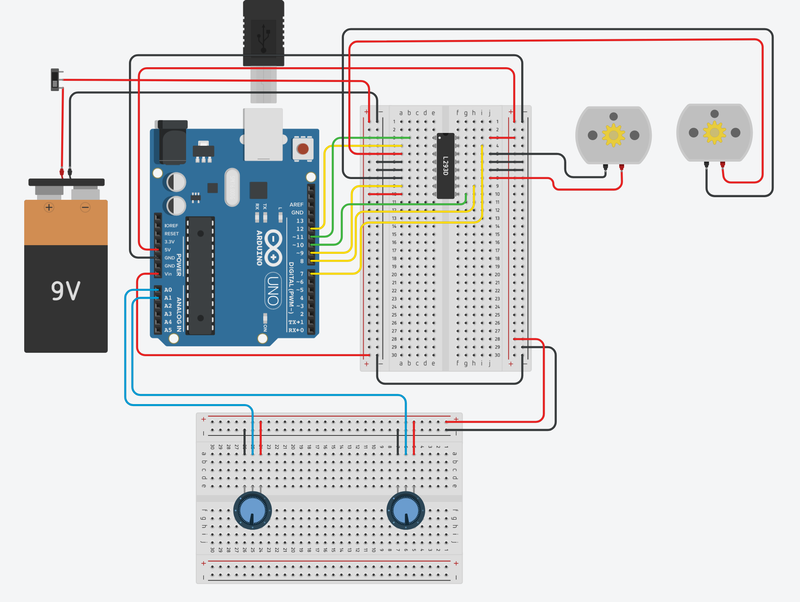 Figure 6. Schematic of the motor control circuit. Click here to download a PDF of the diagram.
Figure 6. Schematic of the motor control circuit. Click here to download a PDF of the diagram.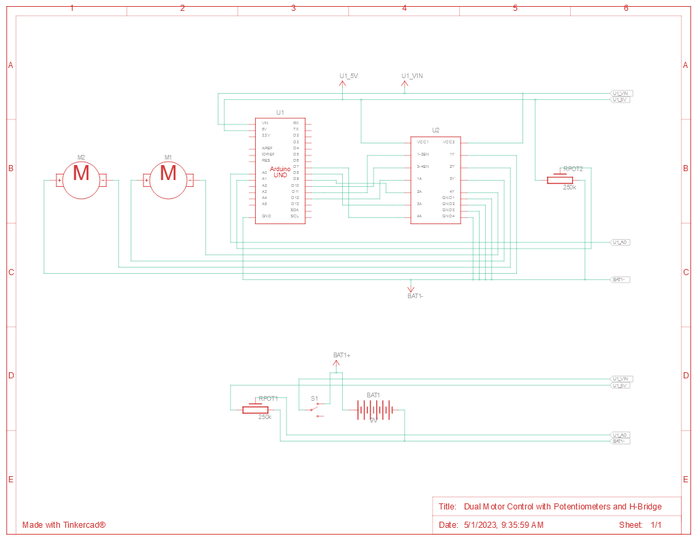
- H-bridge (pins numbered counter-clockwise from the top left). Important: the semi-circular notch in the H-bridge chip should go toward the top of the breadboard (row 1).
- Download the example code.
- Read through the commented code so you understand how it works.
- Make any required changes to the code, such as adding code to control additional motors or sensors.
- Upload the code to your Arduino.
- Test your motor controls. It can be hard to see which way the propellers are spinning, but you can put your hand near them to see which way they are blowing air.
- If needed, make any required corrections to your circuit or code. For example, if a motor is spinning backwards, you can reverse the two control wires connected to the Arduino or switch the two assigned pins in the code. Our Arduino troubleshooting video provides more tips for debugging your circuit if it is not working properly.
- Once you have your circuit working, you are ready to start mounting parts to your waterproof container.
- You should carefully plan out where everything will go before you start drilling holes in your container.
- After drilling holes, remove any sharp burs from their edges, since these could cut the insulation on wires that you push through the holes.
- Figure 7 shows motors bolted to the sides of the container.
- Figure 8 shows the Arduino, breadboard, and battery placed inside the container, with wires connecting the circuit to the external controller, but holes have not been drilled for the wires yet. We recommend not permanently attaching the Arduino and breadboard inside the case, because you will want to remove them to conduct leak testing of your container.
- Figure 9 shows the sealed container with all the electronics placed inside and the wires passing through holes in the container. Note how cable clips and zip ties are used to help relieve stress on wires that pass through the container wall. This is especially important for the tether. You do not want the tether pulling directly on the silicone sealant that you will place around the hole.
Figure 7. Motors bolted to the sides of the waterproof container.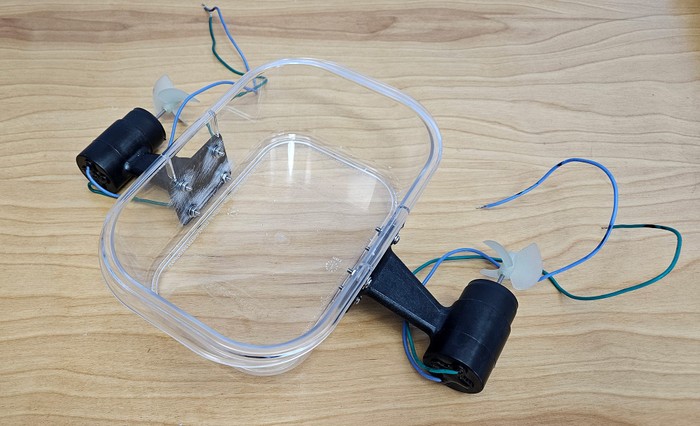 Figure 8. Electronics for the ROV placed inside a waterproof container. The motors are bolted to the sides of the container, but no holes have been drilled for the wires yet.
Figure 8. Electronics for the ROV placed inside a waterproof container. The motors are bolted to the sides of the container, but no holes have been drilled for the wires yet.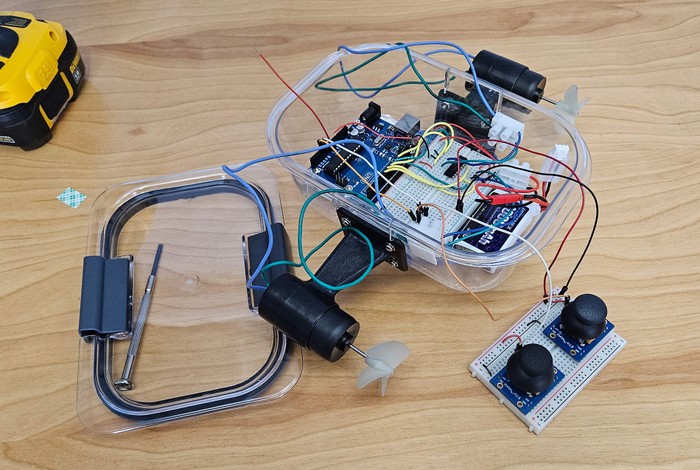 Figure 9. Assembled ROV with all the electronics inside the container.
Figure 9. Assembled ROV with all the electronics inside the container.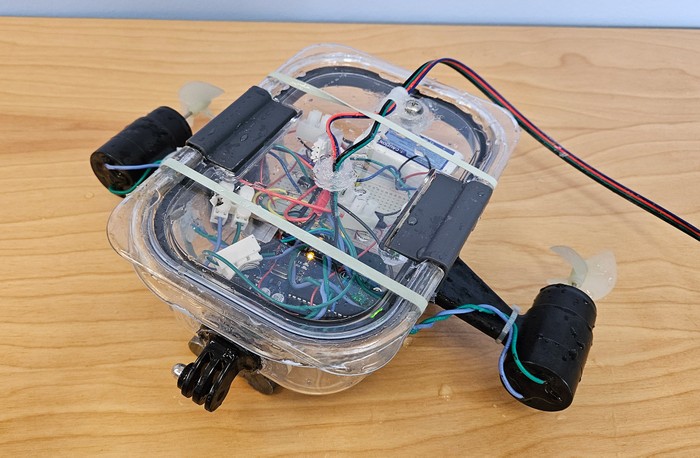
- After you have drilled all the required holes for mounting hardware, passing wires through, etc., follow the instructions for your silicone sealant to seal around the edges of the holes (Figure 10). Make sure you wait for the silicone to dry completely before you continue.
Figure 10. Silicone sealant around the edge of a camera mounting bracket.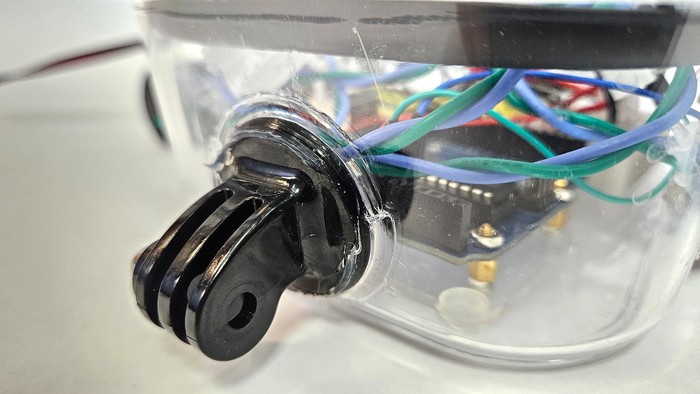
- After the silicone sealant has dried, it is time to conduct leak testing to make sure your container is completely watertight (Figure 11).
- Fill a container of water (sink, bathtub, etc.) large enough to completely submerge your ROV.
- Remove the Arduino, breadboard, and battery from the container.
- Put the lid on the container, making sure that it is sealed tightly.
- Slowly submerge your ROV in the water. Watch carefully for any air bubbles coming out of the container, or water leaking into the container, especially around any holes that you drilled and the edges of the lid.
- Hold your ROV underwater and gently move it around and rotate it as you continue to watch for leaks.
- Remove your ROV from the water. Use a towel to completely dry off the exterior. Check to see if any water has accumulated inside the container.
- If you find any leaks, you will need to patch them (by adding more silicone sealant) and repeat your testing until all leaks have been sealed. If your container leaks around the lid, you may need to use a different container.
Figure 11. ROV submerged in a bathtub for leak testing.
- When you are sure that the container does not leak, you can place the electronics inside. Remember that if you use a waterproof switch mounted to the container (Figure 12), you can turn the ROV on and off without having to remove the lid. You should turn your ROV off when not in use to conserve battery power.
Figure 12. The waterproof power switch on the back of the ROV.
- You may wish to build a handheld controller for your ROV so you are not just holding a breadboard. Figure 13 shows a very simple cardboard base for the controller. It uses screw terminals to connect the flexible tether wires to solid core jumper wires from the breadboard, and a cable clip to prevent the tether from pulling directly on the screw terminals. Note that your hands will probably get wet while handling the ROV, so while simple, cardboard may not be the best choice for a controller!
Figure 13. A simple controller made from cardboard.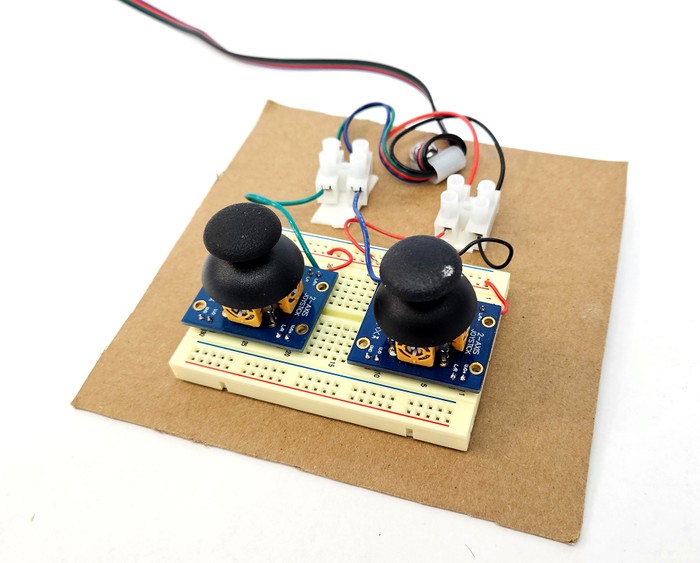
- Once you have your ROV sealed with all the electronics inside and you have finished your controller, you are ready to test your ROV! Turn your ROV on and place it in a tub of water.
- Start by gently pushing the joysticks to practice steering your ROV. Does it move too fast or too slow? If so, you can change the code to adjust how the analogRead values from the joysticks map to the analogWrite functions for motor speed.
- Do you need to adjust your ROV's buoyancy? If so, you can add weights or floats as needed. Figure 14 shows steel rods attached to the bottom of the ROV to make it sink to the bottom.
- Do you have trouble with the tether sinking or getting caught in the propellers? If so, you can consider adding one or more fishing bobbers to the tether to keep it afloat (Figure 15).
- Does your ROV have any attachments or accessories? If so, do they work as intended?
Figure 14. Steel rods attached to the bottom of the ROV with rubber bands to decrease its buoyancy.
Figure 15. Fishing bobber attached to the ROV's tether to help prevent it from sinking.
- Based on your observations, you may need to make changes to your ROV's physical design, code, or both. Remember that it is OK if everything does not work perfectly on the first try, and iteration is an important part of the engineering design process. If needed, improve your design and continue to test your ROV in a smaller container (like a bathtub or kiddie pool) before moving to a larger body of water.
- Once you have your ROV working the way you want it, you are ready for some field testing! Try testing your ROV in a larger body of water (Figure 16). Now you might have to deal with some real-world obstacles, like wind and waves, or debris, like sticks and stones. How does your ROV perform under these conditions? Are there more changes you can make to improve your design?
Figure 16. ROV operating in a lake.
- Once you have your ROV working in "real world" conditions, can you use it to collect data or information about the environment? Figure 17 shows a picture of a school of fish we were able to capture with our ROV. What can you find when you explore? There are many other things you can try with your ROV! See the Variations section for some ideas.
/-/https/www.sciencebuddies.org/cdn/Files/19629/8/arduino-ROV-circuit-picture.jpg)
/-/https/i.ytimg.com/vi/jhRyistosQk/maxresdefault.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19622/7/arduino-ROV-breadboard-diagram.png)
/-/https/www.sciencebuddies.org/cdn/Files/19630/8/arduino-ROV-circuit-diagram.png)
/-/https/www.sciencebuddies.org/cdn/Files/19631/8/arduino-ROV-motors-case.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19632/8/arduino-ROV-case.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19641/8/arduino-ROV-out-of-water.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19633/8/arduino-ROV-silicone-sealant.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19634/8/ROV-bathtub-leak-testing.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19635/8/ROV-waterproof-switch.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19636/8/cardboard-joystick-controller.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19637/8/ROV-steel-weights.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19638/8/ROV-fishing-bobber.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19639/8/arduino-ROV-lake.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19640/8/ROV-underwater-footage-cayuga-lake-fish.jpg)
Figure 17. Picture of a school of fish captured with the Science Buddies ROV.
Ask an Expert
Global Goals
The United Nations Sustainable Development Goals (UNSDGs) are a blueprint to achieve a better and more sustainable future for all.
/-/https/www.sciencebuddies.org/cdn/Files/19757/5/E-WEB-Goal-14.png)
Variations
- Can you make a radio-controlled surface vehicle instead of using a tether? Or make an underwater vehicle that is tethered to a float, which in turn communicates wirelessly with the controller? This can help avoid problems like the tether getting snagged on underwater branches, but it can also be risky if you test your vehicle on a windy day, since there is nothing stopping it from blowing away! You might want to test this type of vehicle in a swimming pool, or make sure you have a boat (like a kayak) available to retrieve it from a pond or lake if you lose radio contact.
- Can you build an autonomous underwater vehicle (AUV) that navigates autonomously using sensor data instead of remote control by a human? As with radio-controlled devices, be careful when testing an AUV and make sure you have a way to retrieve it. You do not want to lose your creation at the bottom of a lake!
- For testing in larger bodies of water, can you add GPS capabilities to your vehicle so you can find it again if you lose sight of it?
- If you want to get deeper into the world of ROVs and even participate in competitions, check out the SeaPerch program.
Careers
If you like this project, you might enjoy exploring these related careers:
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1408/24/iStock-507243709.jpg)
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1725/18/4161_Michelle_Easter_and_Curiousity_Clone.jpg)
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1223/17/iStock-971549326.jpg)
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1450/21/iStock-1227179796.jpg)
Contact Us
Our kits are developed in partnership with Home Science Tools®. If you have purchased a kit for this project, Home Science Tools® is pleased to answer any questions.In your email, please follow these instructions:
- Include your Home Science Tools® order number.
- Please describe how you need help as thoroughly as possible:
Examples
Good Question I'm trying to do Experimental Procedure step #5, "Scrape the insulation from the wire. . ." How do I know when I've scraped enough?
Good Question I'm at Experimental Procedure step #7, "Move the magnet back and forth . . ." and the LED is not lighting up.
Bad Question I don't understand the instructions. Help!
Good Question I am purchasing my materials. Can I substitute a 1N34 diode for the 1N25 diode called for in the material list?
Bad Question Can I use a different part?
Contact Support

/-/https/img.youtube.com/vi/I7MrL5Q7zvY/0.jpg)
/-/https/img.youtube.com/vi/h1Vs6_3PXY4/0.jpg)
/-/https/img.youtube.com/vi/6KttMKX17YE/0.jpg)
.jpg){kind=link}
{kind=link}