Abstract
Humans are pretty good at building vehicles with wheels, but building machines with legs that walk like us is a lot harder! In this engineering project you will build a simple robot that walks using a single motor. How fast can you make your robot go?
Summary
None
DC motor and battery required, see materials list for details
No issues
/-/https/i.ytimg.com/vi/0BzRui20SO4/maxresdefault.jpg)
Objective
Design, build, and test your own walking robot.
Introduction
/-/https/www.sciencebuddies.org/cdn/Files/19830/11/simple-walking-robots-main.jpg)
We might take it for granted sometimes, but humans are very good at walking. We can walk on flat ground, up stairs, and over rocks without giving it much thought. Our muscles, senses, and brains have been fine-tuned by millions of years of evolution to make us very good at getting around in our physical environment. As you can see in the following video, designing robots that can walk and move around like humans, including simple tasks like opening a door or getting out of a car, is very challenging!
/-/https/i.ytimg.com/vi/g0TaYhjpOfo/maxresdefault.jpg)
In this project you will build your own very simple robot that uses feet to move instead of wheels. The robot uses a mechanical linkage to convert the rotational motion of a motor's shaft to oscillating motion of the feet. The type of linkage you will use is called a slider-crank (Figure 1). One part of the mechanism, the slider (the dowel inside the straw), slides back and forth. The other part, the crank (the motor's shaft), rotates in a circle. A slider crank lets you convert rotational motion to oscillating motion or vice versa.
/-/https/www.sciencebuddies.org/cdn/Files/19823/11/slider-crank-mechanism.jpg)
Figure 1. A side view of the slider crank mechanism. Rotational motion of the motor's shaft is converted to back-and-forth motion of the wooden dowel.
You will not worry about balancing your robot on two feet for this project—you will build an additional support to keep the robot from falling over. However, you will still learn about mechanisms and how to convert one type of motion to another. Can you improve your robot's design to make it go faster? Try this project and find out!
Terms and Concepts
- Robot
- Linkage
- Rotational
- Oscillating
- Slider-crank
Questions
- What are some advantages and disadvantages of getting around using legs instead of wheels?
- What are some challenges in building a walking robot?
- What are some different types of mechanical linkages? How do they work?
Bibliography
The following videos provided inspiration for the robot design in this project. Notice how some of them use different materials:
- Amr MCI (2017, Jan 22). How To Make The Cutest Walking Robot On YouTube. Retrieved August 25, 2023.
- GOODTECH - Creativity and Science (2018, Oct 2). How to make Cute Walking Robot - simple DIY Robot. Retrieved August 25, 2023.
- A2C Creations (2019, Aug 8). A simple walking Robot project for Kids using DC motor. Retrieved August 25, 2023.
Use this Science Buddies resource to learn about the engineering design process:
- Science Buddies Staff (n.d.). Engineering Design Process. Retrieved August 25, 2023.
Materials and Equipment
Note: this is an engineering design project. The materials listed here are required to follow the build in this project's procedure, but you can substitute different materials.
- Geared DC motor
- 3.7V, 400mAh lithium polymer battery and compatible charger
- Drinking straw
- Wooden dowel (smaller diameter than the straw)
- Wooden skewer (smaller diameter than the dowel)
- Popsicle stick
- Double-sided foam tape
- Scissors
- Hot glue gun
- Optional: decorations (googly eyes etc.)
- Lab notebook
Disclaimer: Science Buddies participates in affiliate programs with Home Science Tools®, Amazon.com, Carolina Biological, and Jameco Electronics. Proceeds from the affiliate programs help support Science Buddies, a 501(c)(3) public charity, and keep our resources free for everyone. Our top priority is student learning. If you have any comments (positive or negative) related to purchases you've made for science projects from recommendations on our site, please let us know. Write to us at [email protected].
Experimental Procedure
- Build the robot's legs as shown in Figure 2.
- Cut a short piece of the wooden dowel (a few centimeters long). Since this is an engineering design project, exact lengths are not given. You can experiment with the linkage design to see how it affects your robot's motion.
- Cut a second, shorter piece of the dowel, and glue it to one end of the first piece at a 90 degree angle as shown.
- Cut a longer piece of the wooden skewer, and glue it to the center of the first dowel piece at a 90 degree angle as shown.
- Cut a piece of the popsicle stick and glue it to the bottom of the first dowel piece to make a foot.
- Repeat this process to build the second leg, which should be a mirror image of the first leg.

Figure 2. The robot's legs. Note that the legs are mirror images of each other. - Glue short pieces of straw to the motor's shaft as shown in Figures 3 and 4. The straw pieces should be on opposite sides of the shaft (one should be on the "top" while the other is on the "bottom").
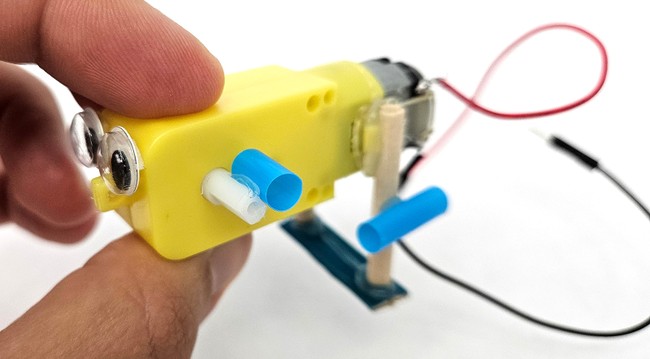
Figure 3. Side view of a straw piece glued to the motor's shaft.
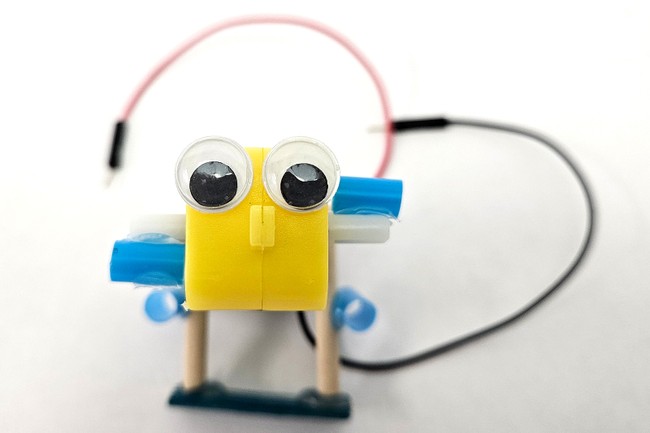
Figure 4. Front view of straws glued to motor shaft. Note how one straw is on the top while the other is on the bottom. - Build a rear support for the robot as shown in Figure 5.
- Cut two pieces of the wooden dowel and glue them vertically to the sides of the motor.
- Glue a piece of the popsicle stick to the bottom of the dowels.
- Cut two pieces of the straw and glue them horizontally in the middle of the dowels.

Figure 5. Rear view of the robot's rear support. - Apply beads of glue to the bottoms of your robot's feet (but not the rear support) to give them more grip.
- Place the legs into the straws to form the slider-crank mechanism, as shown in Figure 6.
- Slide the long wooden skewer through the horizontal straw attached to the rear support.
- Slide the short wooden dowel into the straw that is glued to the motor shaft.

Figure 6. Side view of the slider crank mechanism. - Use double-sided foam tape to attach the battery to the top of the motor, as shown in Figure 7.
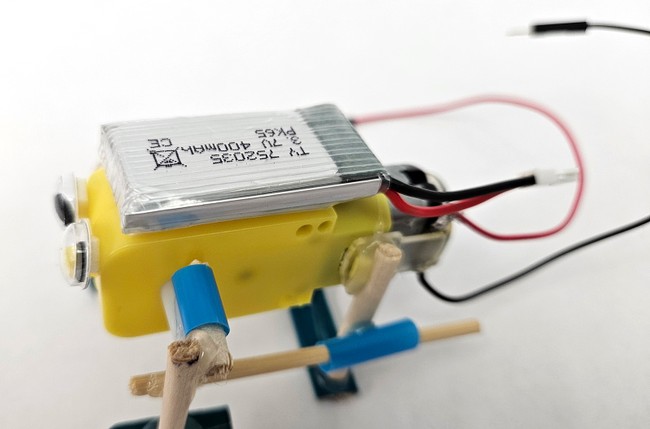
Figure 7. Battery taped to the top of the robot. - Hold your robot up in the air and plug the motor pins into the battery connector. If the motor's shaft spins the wrong way (such that the robot would walk backwards), reverse the pins.
- Gently place your robot down and watch it walk! Observe your robot carefully to see what happens. If it falls over or the legs fall out, you may need to adjust your mechanism, for example by changing the length of a straw or dowel piece. You can do this by carefully peeling off the glue and re-gluing a new piece. If you make changes, they should be symmetric (on both sides of the robot), but otherwise you should only change one thing at a time before you re-test your robot.
- Apply the engineering design process to try and improve your robot's design. How does changing the linkage design affect your robot's speed? You may find it easier to buy more parts and build multiple robots so you do not have to keep peeling glue off your first robot (Figure 8).

Figure 8. Two versions of the robot with slightly different linkage geometry.
/-/https/www.sciencebuddies.org/cdn/Files/19824/11/walking-robot-legs.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19825/11/walking-robot-straws-side.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19826/11/walking-robot-straws-front.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19827/11/robot-rear-support.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19828/11/walking-robot-slider-crank.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19829/11/walking-robot-battery.jpg)
/-/https/www.sciencebuddies.org/cdn/Files/19831/11/simple-walking-robots.jpg)
Ask an Expert
Global Goals
The United Nations Sustainable Development Goals (UNSDGs) are a blueprint to achieve a better and more sustainable future for all.
/-/https/www.sciencebuddies.org/cdn/Files/19752/5/E-WEB-Goal-09.png)
Variations
- Can you make a robot that walks on four legs as shown in the video How To Make A Very Simple 4 Legged Walking Robot?
- Can you make a robot that actually balances on two legs and does not require an extra support, as shown in the video How To Make An Adorable Walking Robot with Big Shoes?
- Can you make a programmable walking robot where you can individually control the motion of the legs? See our Build an Arduino Walking Robot project for instructions.
Careers
If you like this project, you might enjoy exploring these related careers:
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1725/18/4161_Michelle_Easter_and_Curiousity_Clone.jpg)
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1731/17/iStock-1187291213.jpg)
/-/https/careerdiscovery.sciencebuddies.org/cdn/Files/1450/21/iStock-1227179796.jpg)

/-/https/img.youtube.com/vi/w2meaXDflFQ/0.jpg)
/-/https/img.youtube.com/vi/6nEH2XlcJt8/0.jpg)
/-/https/img.youtube.com/vi/CmV2QZvfgck/0.jpg)